Av 二维向量坐标系变换实例(齐次坐标)
阅读量:[object Object]
#开花
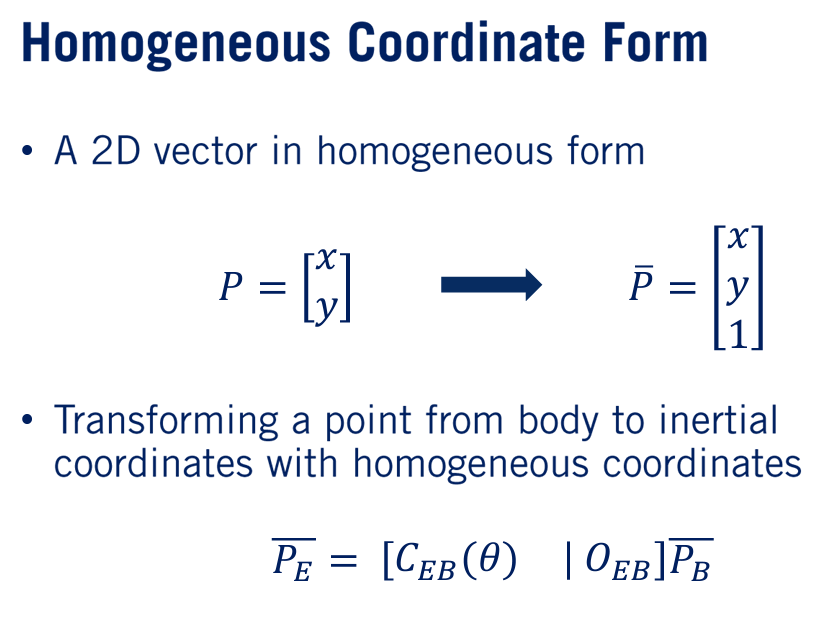
首先将二维速度向量写成 齐次坐标 的形式(如下图)
再根据 [[ 旋转矩阵 ]] 和两个坐标系间的距离
再将变换矩阵与坐标相乘得到新坐标系下的坐标
- 整理 Transformation 变换 笔记
与计算机图形学中的 [[ Transformation 变换#^04bbec|旋转变换 ]] 结合 [[ Transformation 变换#^9c5863|平移变换 ]] 相同,需要进一步整理
反向链接
到头儿啦~
预览: