Transformation 变换
阅读量:[object Object]
模型变换(Modeling)和视图变换(Viewing)
WHY
描述移动、旋转、缩放和投影操作对图像的影响
视图变换 Modeling
缩放变换 Scale
缩放矩阵 Scale Matrix
当进行均匀缩放时,
缩放矩阵符号表示:
反转矩阵 Reflection Matrix
切变 Shear Matrix
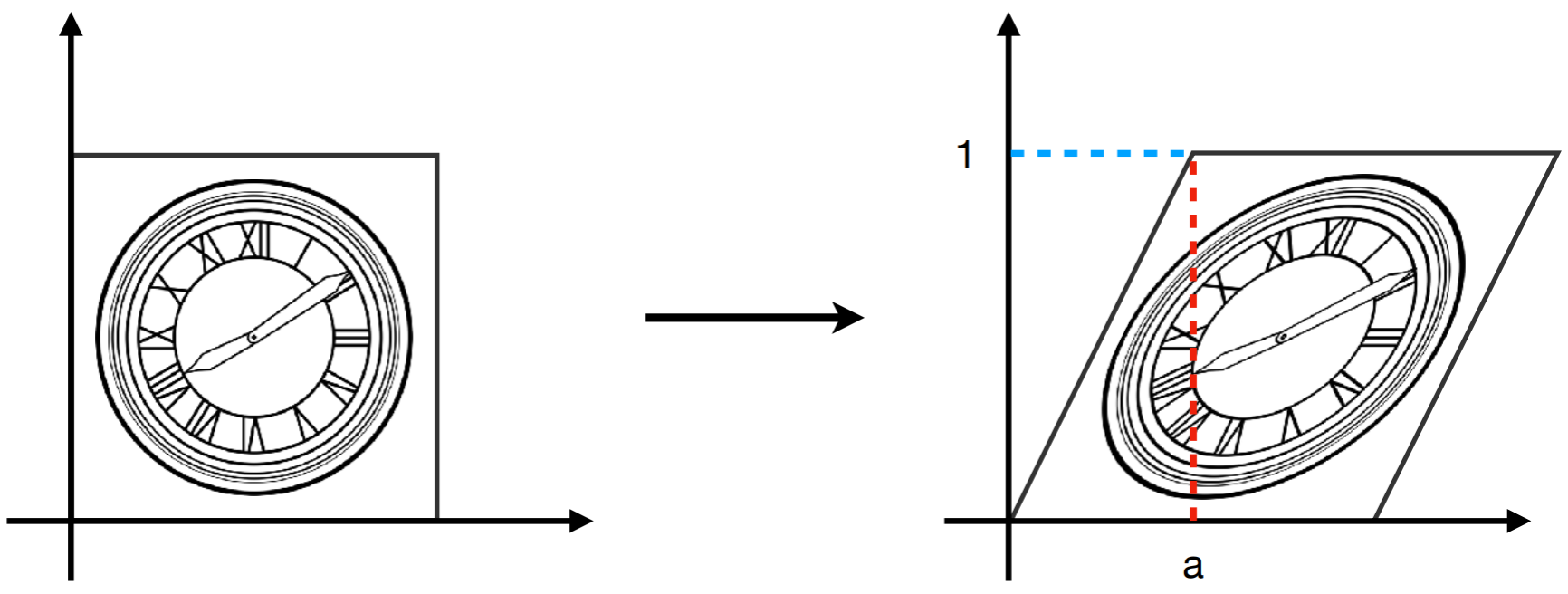
根据变换前后的对应函数关系确定变换矩阵。
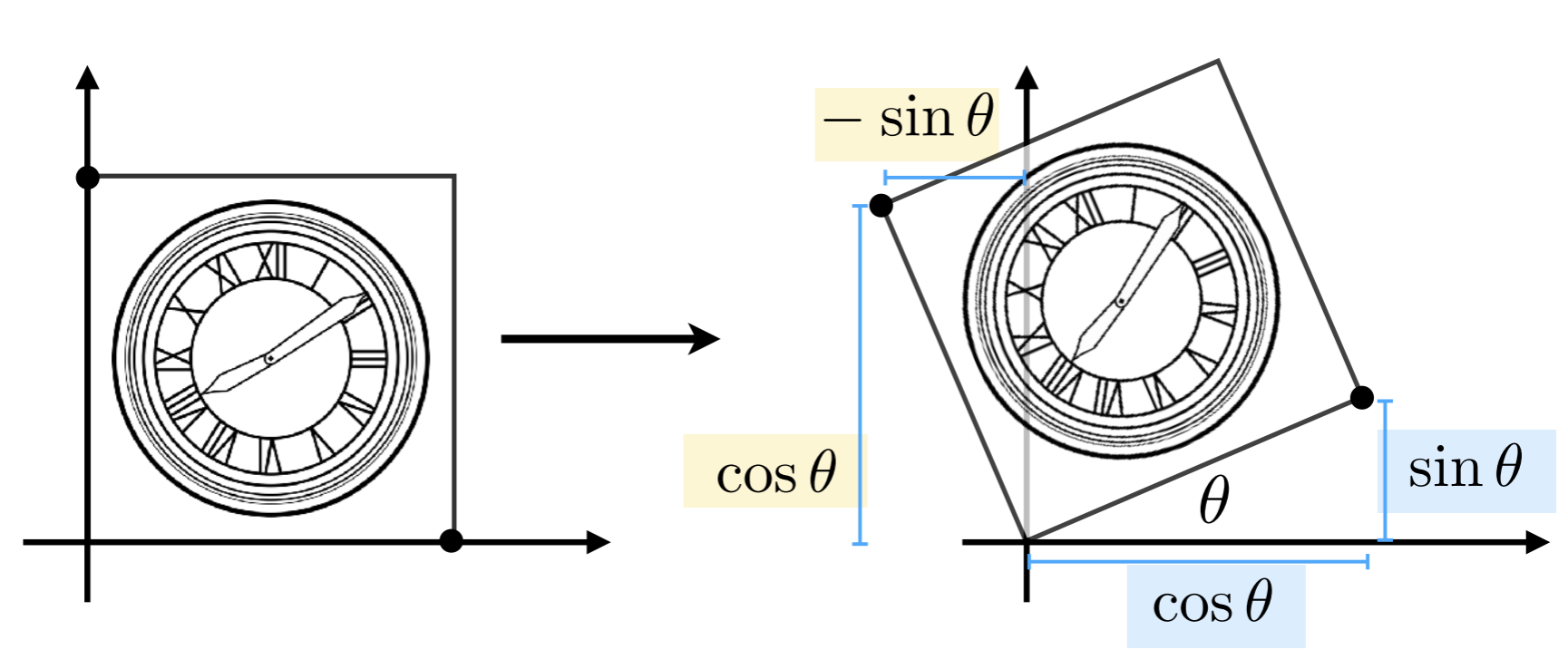
旋转变换 Rotate
^04bbec
默认绕原点,逆时针方向进行旋转。
旋转矩阵 Rotation Matrix
平移变换 Translation
^9c5863
平移变换无法仅使用矩阵乘积的形式进行描述,因此引入 齐次坐标,将所有的变换均可仅用矩阵乘积的形式进行描述。
平移变换的矩阵形式(齐次坐标)
仿射变换 Affine Transformation
仿射变换 = 线性变换 + 平移变换
缩放、旋转均为线性变换
先线性变换,再平移变换
在齐次坐标中
在表示二维仿射变换下,变换矩阵的最后一行为
齐次坐标下的变换矩阵
- 缩放
- 旋转
- 平移
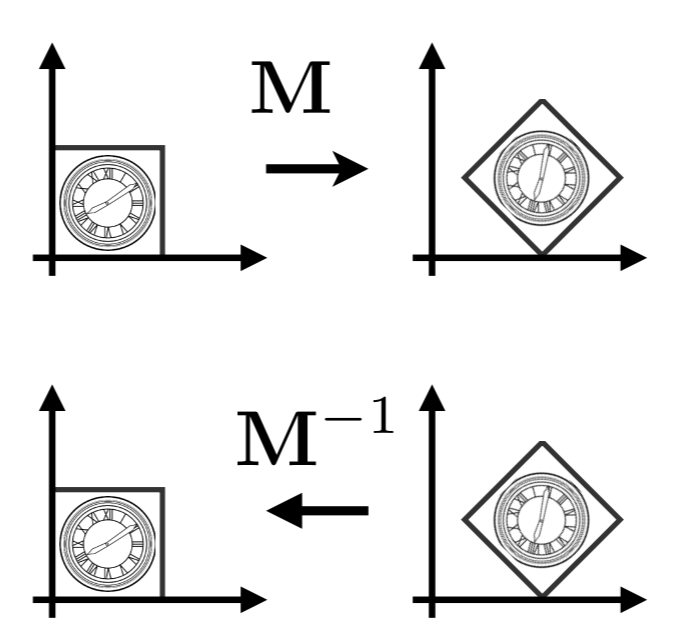
逆变换 Inverse Transformation
变换矩阵的逆矩阵
组合变换 Composing Transform
连续进行多种不同的变换。变换的顺序对变换结果有影响,即
变换矩阵按照变换顺序从右向左相乘,例如,先旋转
一系列仿射变换:
可先计算所有的变换矩阵,得到一个变换矩阵,提高效率。
复杂变换分解 Decomposing Complex Transformation
以任意点
- 将点
- 旋转
- 平移至原来的状态
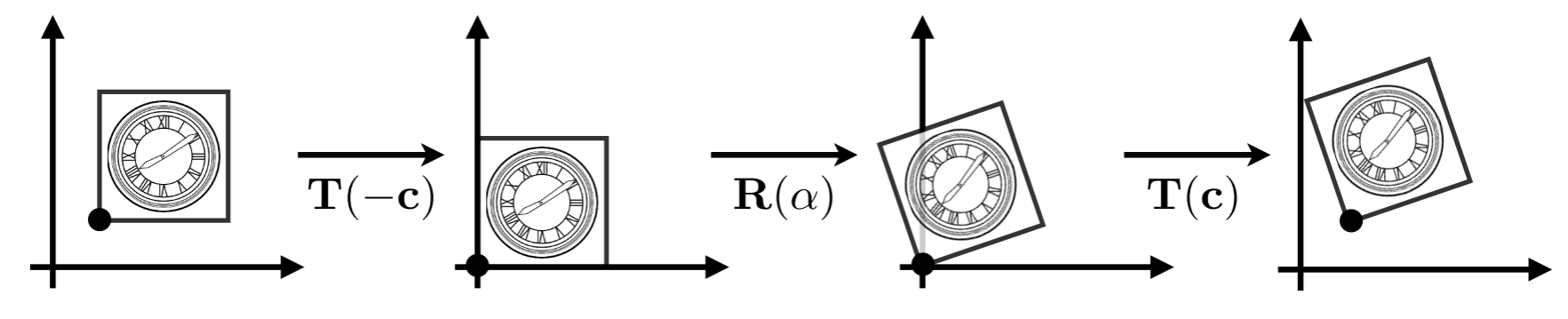
在三维变换中,沿任意轴进行旋转可采用同样的思路。
三维变换 3D Transformation
三维空间下的齐次坐标:
点
向量
三维仿射变换可用
#待整理笔记
反向链接
到头儿啦~
预览: