双轮机器人运动学模型
阅读量:
#发芽
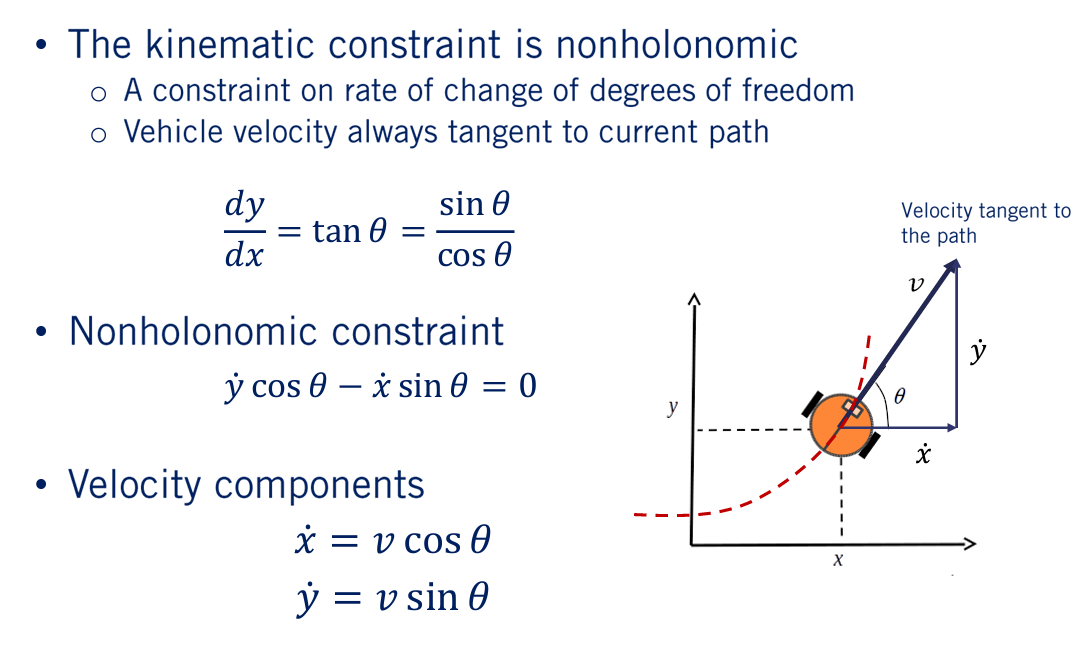
由于双轮机器人只能前后移动及旋转,无法横向移动,因此该机器人为 非完整性约束机器人
模型 1 - 整体
当我们将机器人考虑为一个整体时,如下图所示,在固定的二维坐标系中,机器人的位置为
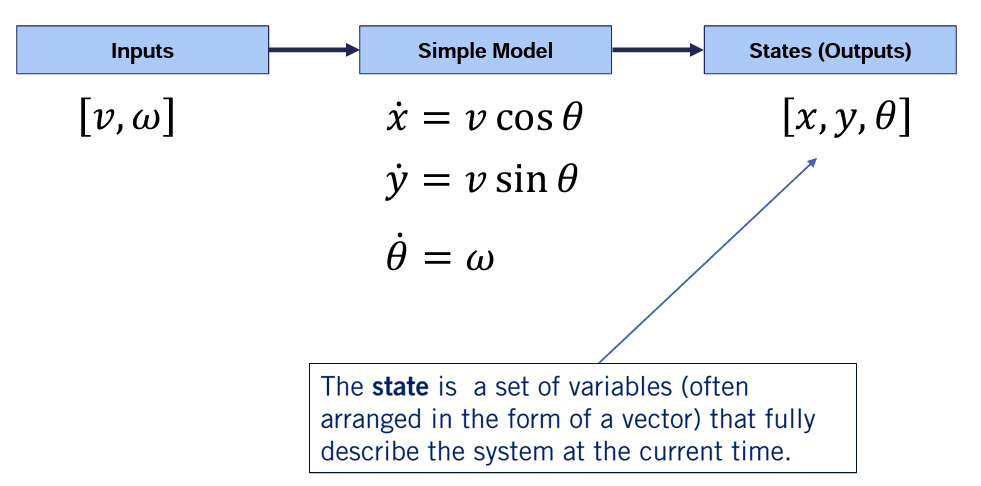
因此,该机器人运动的运动学模型如图。其输入为机器人的速度和角速度,输出( [[ 状态变量 ]])为机器人的空间坐标和旋转角度。
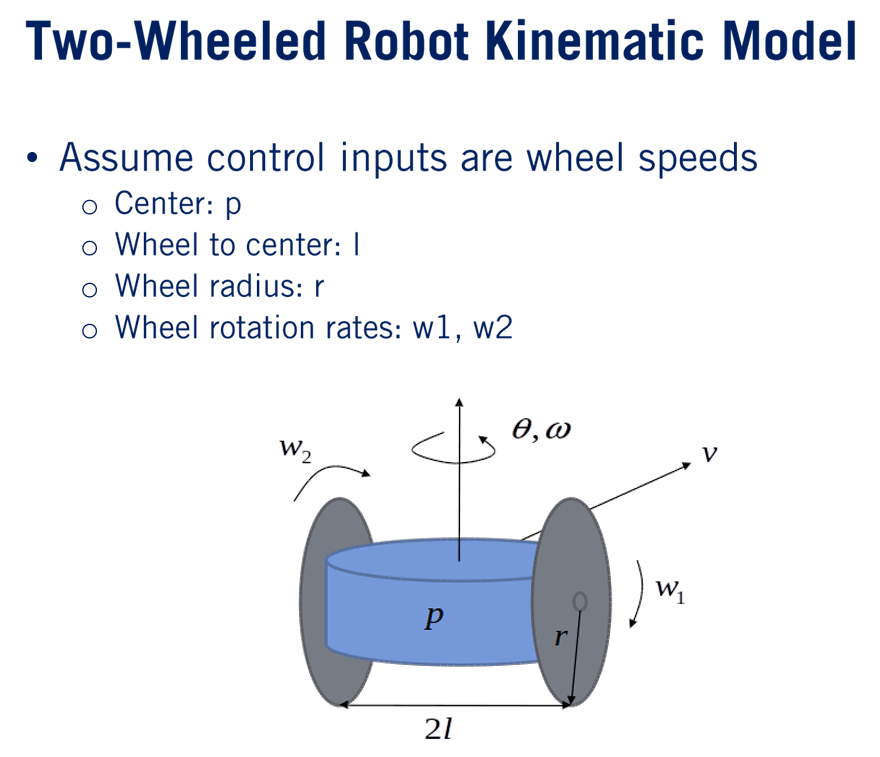
模型 2 - 考虑车轮
定义双轮机器人相关参数如图
反向链接
到头儿啦~
#发芽
由于双轮机器人只能前后移动及旋转,无法横向移动,因此该机器人为 非完整性约束机器人
当我们将机器人考虑为一个整体时,如下图所示,在固定的二维坐标系中,机器人的位置为
因此,该机器人运动的运动学模型如图。其输入为机器人的速度和角速度,输出( [[ 状态变量 ]])为机器人的空间坐标和旋转角度。
定义双轮机器人相关参数如图
预览: