向量运算
阅读量:[object Object]
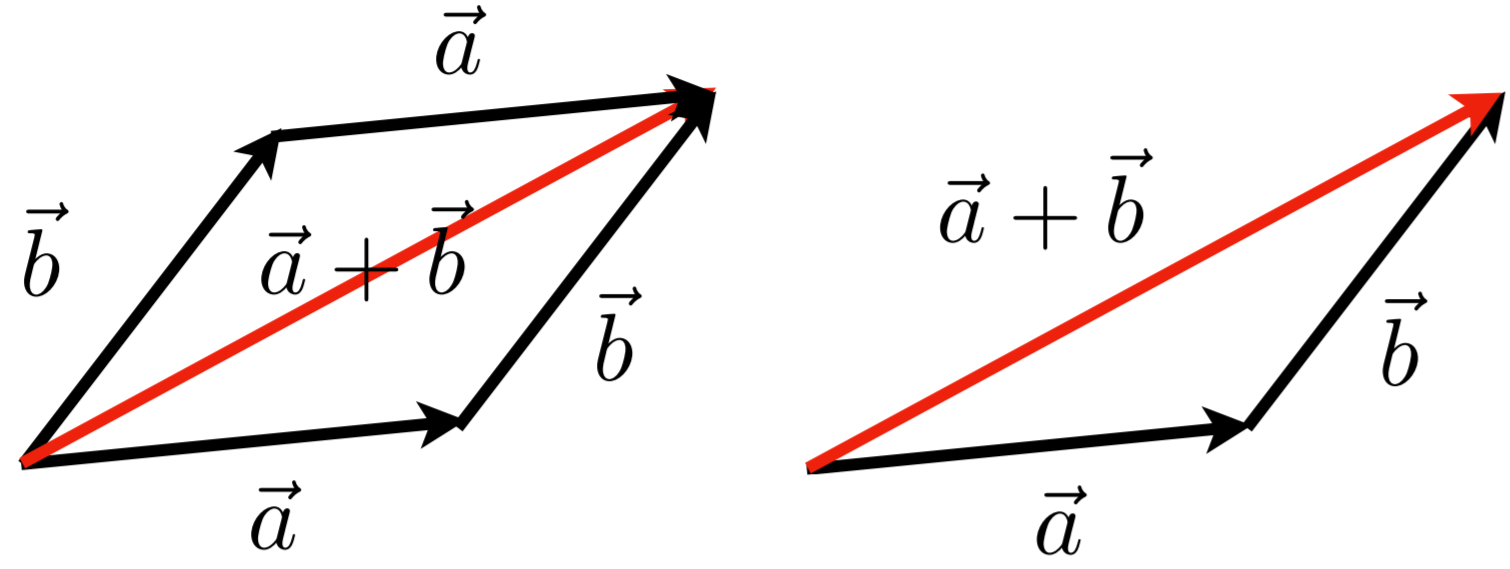
向量求和
几何 Geometrically:平行四边形法则,三角形法则
代数 Algebraically:坐标相加
向量乘法
点乘 Dot (Scalar) Product
点乘结果为数量
向量点乘符合交换律、分配律和结合律。
在笛卡尔坐标系下:
2D
3D
作用:
- 找到两个向量间的夹角
- 找到一个向量在另一个向量上的投影
叉乘 Cross (Vector) Product
叉乘的结果是一个向量,是与两个原始向量正交的向量。
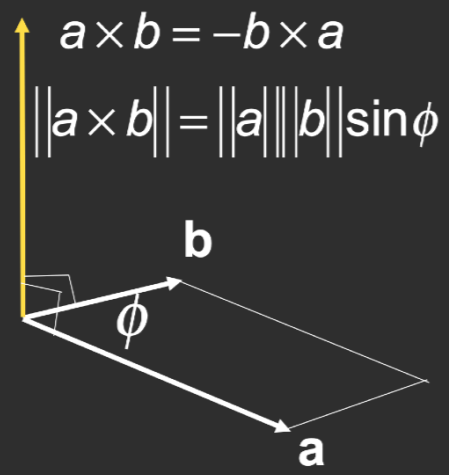
结果向量的方向由右手法则决定,四指沿被乘向量(算式中第一个向量)以小于 180 角的方向绕至叉乘向量(算式中第二个向量),此时拇指所指方向即为结果向量的方向。
向量叉乘不符合交换律,符合分配律和结合律。
向量叉乘其本身得到是与其自身正交的零向量。
在笛卡尔坐标系下:
作用:
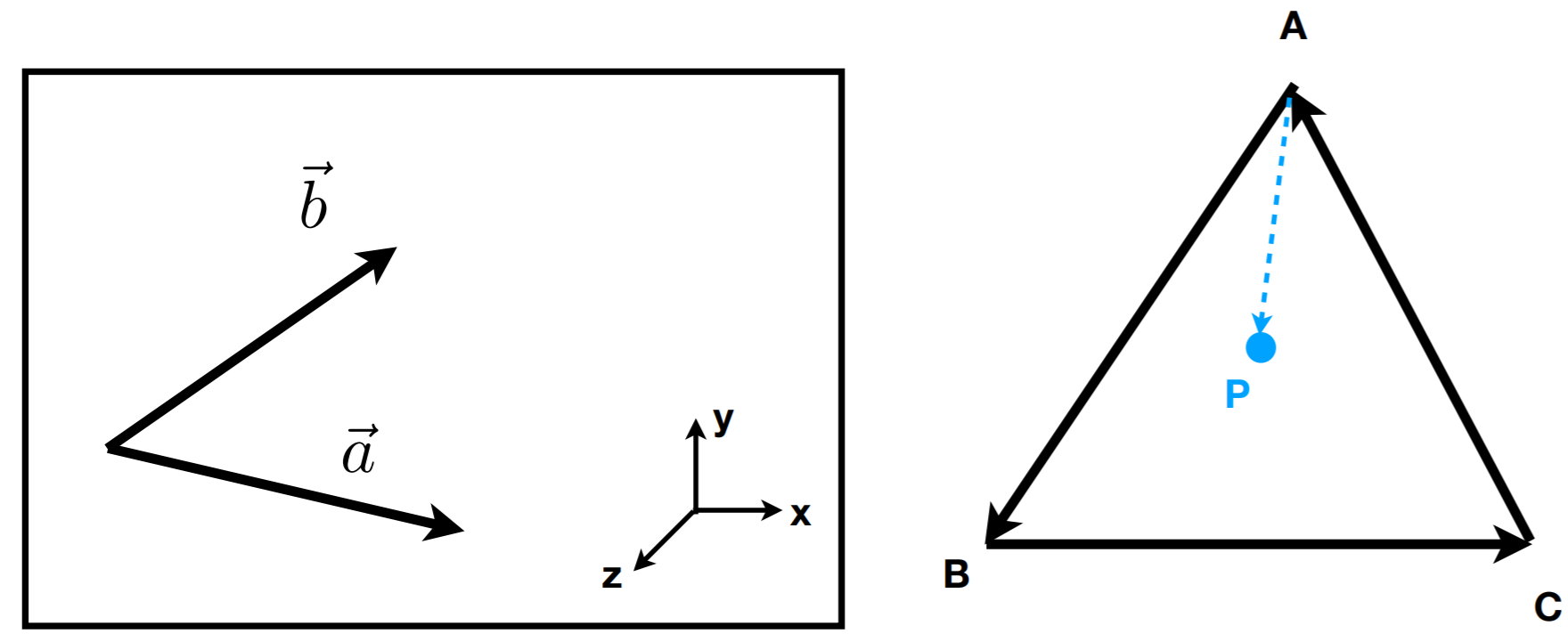
- 构建直角坐标系,通过右手法则构建的坐标系为右手坐标系,结果向量方向相反时为左手坐标系。
- 判定一个向量在另一个向量的左右,乘积为正向左,为负向右(逆时针向左,顺时针向右)。
- 判定一个点在一个多边形的内外。按顺序依次连接点与多边形的各个顶点,判断从被连接的顶点出发的两个向量的方位,重复直至完成所有顶点的判断,均在同侧时为内,反之为外。
正交坐标系
可用来进行向量分解
向量投影
作用:
- 分解向量
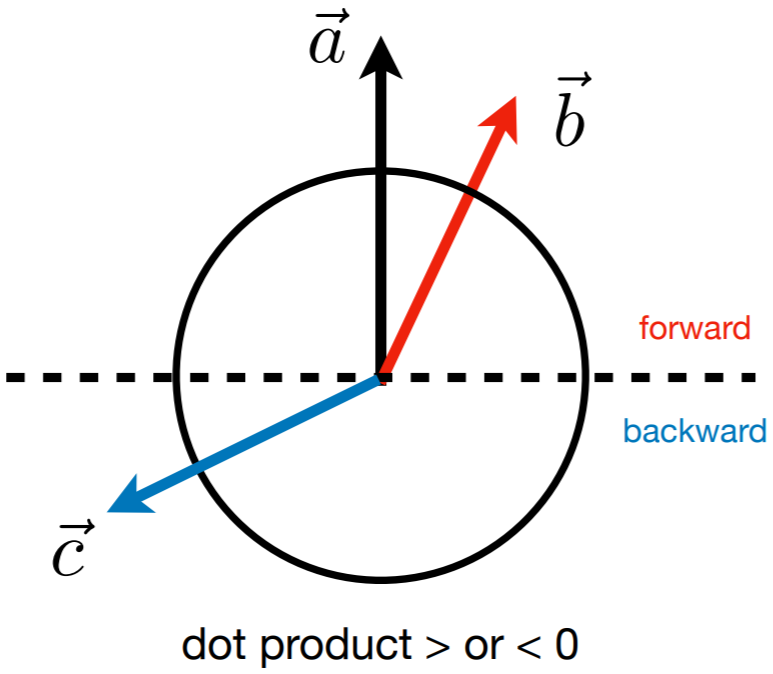
- 评价两个向量方向的接近程度,[-1, 1],-1 为完全相反,0 为垂直,1 为完全相同。
- 决定前向和后向。
向量乘法的矩阵形式
反向链接
到头儿啦~
预览: